





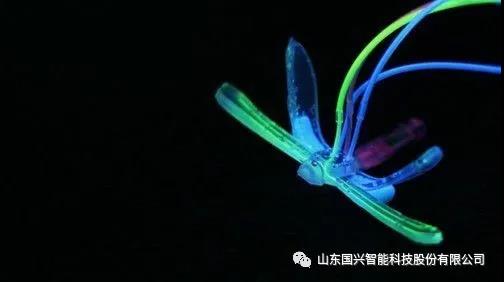
可探測水中環境的蜻蜓軟體機器人
外國某工程師團隊開發出(chu)了一種完(wan)全(quan)柔軟(ruan)的(de)機(ji)器人(ren),形(xing)狀(zhuang)像蜻(qing)蜓,旨(zhi)在(zai)(zai)滑(hua)過水面并(bing)對環境(jing)條(tiao)件做出(chu)反應。這款名為(wei)DraBot的(de)機(ji)器人(ren)完(wan)全(quan)不(bu)需要電子裝(zhuang)置,可(ke)以對環境(jing)條(tiao)件做出(chu)反應,比如pH值、溫度或是(shi)否存(cun)在(zai)(zai)油污。
研究人員認為,該原(yuan)理驗證示范裝置可以(yi)成為更先進的自主和(he)遠程(cheng)環境機器人,能(neng)夠幫(bang)助水體監測工作(zuo)解決一(yi)系列問題。
該項目的研究(jiu)人(ren)員(yuan)首先設計了(le)一(yi)個基于蒼蠅的軟機(ji)器人(ren)。經過數次迭(die)代,研究(jiu)人(ren)員(yuan)確定了(le)蜻蜓的形狀(zhuang),并設計了(le)一(yi)個內(nei)部微通(tong)道網(wang)絡(luo),使其(qi)能(neng)夠通(tong)過氣壓(ya)進(jin)行控制。機(ji)器人(ren)的身(shen)體長約2.25英寸,翼(yi)展1.4英寸。
機器人的本(ben)體是通(tong)過將(jiang)硅(gui)倒入鋁制模具中烘(hong)烤而成(cheng)。內部通(tong)道使用軟光刻(ke)技術(shu)創建,并用柔(rou)性硅(gui)管連接(jie)。研究(jiu)人員面臨的挑戰是讓DraBot在(zai)沒有任何電子裝置的情(qing)況下,使用自動執(zhi)行裝置對(dui)長(chang)距離的氣壓(ya)控制做出反應(ying)。
DraBot通過控(kong)制進入其“翅膀(bang)”的氣(qi)(qi)壓來工作。微通道將空氣(qi)(qi)擠壓到前(qian)翼(yi),在那里通過一系(xi)列指向后翼(yi)的孔(kong)逸出。當(dang)(dang)后翼(yi)向下(xia)時,氣(qi)(qi)流被阻斷,DraBot就會(hui)保持(chi)靜止。當(dang)(dang)兩翼(yi)向上時,DraBot就會(hui)向前(qian)移動。
該團隊還在每個后翼下設計了靠近機器(qi)人身體的(de)(de)“氣(qi)球”驅動器(qi)。當這些(xie)氣(qi)球充氣(qi)時,會使(shi)翅(chi)膀向上移動,讓(rang)控制器(qi)告訴機器(qi)人去哪(na)里。翅(chi)膀上涂有自愈性水(shui)凝膠,使(shi)其(qi)對(dui)水(shui)的(de)(de)pH值變化做出反(fan)應(ying)。
; 當水呈酸性(xing)時,一個前翼與后翼融合,使機(ji)器(qi)人旋轉一圈而不是直線(xian)行駛(shi)。當pH值恢復正常時,融合的翅膀就會(hui)分開,機(ji)器(qi)人就會(hui)對指令做出反應。研究人員還在機(ji)器(qi)人上放置了海綿,這些海綿會(hui)吸(xi)收(shou)油污并改 變(bian)顏(yan)色,表(biao)明其存在。如(ru)果水溫過高,DraBot的翅膀也(ye)會(hui)從紅色變(bian)成黃(huang)色。
【內容來源網絡,如有侵權(quan)請聯系刪除】
相關標簽
新聞分享